Alan Ramirez, Zoey You, Sarah Huang, Sophia Zhao
16299 Final Project: Centrifuge Tube Transporter
A feedback control algorithm for transporting a centrifuge tube containing separated liquid layers using a Franka Panda robotic arm while minimizing mixing.
Without PID
.gif)
With Wrist Orientation PID
.gif)
Motivation
Biology labs increasingly rely on robotic automation, but standard motion planning ignores the physics of sensitive payloads. Moving a centrifuge tube too aggressively mixes its separated layers, ruining the sample. This project considers these constraints to transport the tube as fast as possible while keeping mixing as low as possible using active feedback control.
How It Works
Mixing Metric
Liquid simulation is tricky. It is instead dealt with by defining a proxy metric:
tube_axis: which way the tube is pointing (gripper Z-axis)a_effective: gravity + end-effector acceleration (what the liquid feels)a_liquid:a_effectivewith a 1-second lag, modeling liquid inertiamix_angle: angle betweentube_axisanda_liquid
mix_angle = arccos(dot(tube_axis, a_liquid / |a_liquid|)) [degrees]
0° = tube perfectly aligned with liquid settlement = no mixing risk. The integrated mixing score ∫ mix_angle dt (°·s) is the primary benchmark.
System Architecture
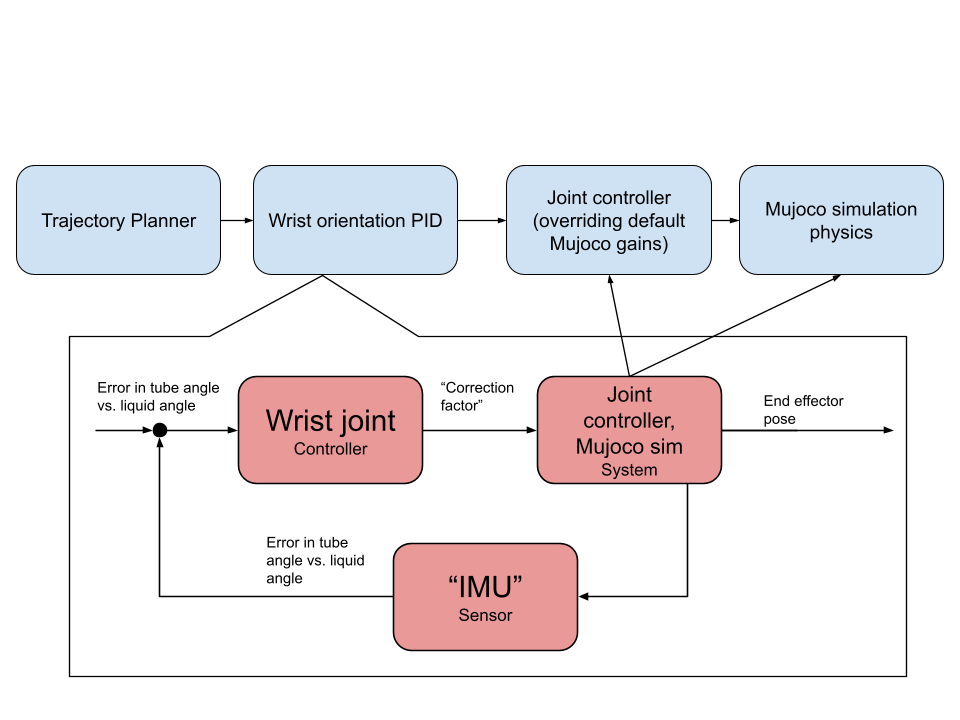
Three layers:
-
Trajectory Planner: 5th-order minimum-jerk polynomial per phase. Zero velocity and acceleration at endpoints minimizes jerk. Phases: Hover → Descend → Grasp → Lift → Transport → Place → Release.
-
Wrist Orientation PID: closed-loop controller on
mix_angle. Correction projected into Jacobian null-space to rotate the wrist toward alignment without disturbing end-effector position. -
Joint PID: custom torque controller overriding MuJoCo’s default gains:
τ = Kp*(q_des - q) - Kd*q̇
Key Implementation Details
Minimum-jerk trajectory (Flash & Hogan 1985, Macfarlane & Croft 2003):
x(t) = a₀ + a₁t + a₂t² + a₃t³ + a₄t⁴ + a₅t⁵
a₃ = 10(xf-x₀)/T³, a₄ = -15(xf-x₀)/T⁴, a₅ = 6(xf-x₀)/T⁵
Damped least-squares IK (Buss 2009) converts Cartesian targets to joint angles without singularity blowup:
dq = Jᵀ(JJᵀ + λ²I)⁻¹ dx
Null-space injection (Liégeois 1977) lets wrist orientation control run without fighting the position task.
Files
test_picking.py: Interactive simulator with real-time viewer. Runs one trial with configurable LIQUID_TAU and wrist PID gains.record_test_picking.py: Offline video recorder. Generates MP4 of trajectory with custom camera angles for visualization.trial_runs.py: Batch sweep over LIQUID_TAU (0.0→2.0s). Runs multiple trials and saves stats to CSV.
Results
Linearly interpolated lag (LIQUID_TAU) from 0.0 to 2.0 seconds across 50 trials each with and without wrist orientation PID control.
| Metric | No Wrist PID | With Wrist PID |
|---|---|---|
| Mean avg EE speed (m/s) | 0.3726 | 0.4076 |
| Mean max EE speed (m/s) | 1.2977 | 1.4255 |
| Mean avg pos error (m) | 0.0781 | 0.0843 |
| Mean max pos error (m) | 0.3246 | 0.3338 |
| Mean avg mix angle (°) | 34.41 | 14.09 |
| Mean max mix angle (°) | 43.80 | 41.51 |
| Mean integrated mix (°·s) | 96.42 | 39.49 |
Replication
Requirements
pip install mujoco numpy
mjpython main.py # mjpython required on macOS Apple Silicon
Place your Franka Panda XML at franka_emika_panda/scene.xml. The script auto-generates a combined scene with the centrifuge tube injected.
Key Parameters
| Parameter | Default | Effect |
|---|---|---|
LIQUID_TAU |
1.0s | Liquid reorientation lag |
ACCEL_LPFILTER_ALPHA |
0.03 | Acceleration smoothing |
USE_WRIST_PID |
True | Enable closed-loop mixing control |
wrist_pid kp |
0.5 | Correction aggressiveness |
wrist_pid kd |
0.1 | Wrist damping: increase if oscillating |
Tuning the PID
Start with ki=0, kd=0. Increase kp until the arm visibly corrects wrist orientation during transport. Add kd if the wrist oscillates.
Future Work
- RL: use reinforcement learning with a mixing penalty in the reward function to find optimal transport trajectories, combined with PID for fine-grained EE control
- Real hardware: transfer to a physical Franka Panda arm; primary challenge is noisy acceleration estimation and tube pickup calibration
- Fluid simulation: replace the proxy metric with particle-based simulation for ground-truth mixing measurement
References
- Flash & Hogan (1985). The coordination of arm movements. Journal of Neuroscience, 5(7).
- Macfarlane & Croft (2003). Jerk-bounded manipulator trajectory planning. IEEE T-RA, 19(1).
- Buss (2009). Introduction to inverse kinematics with Jacobian transpose, pseudoinverse and damped least squares methods.
- Liégeois (1977). Automatic supervisory control of multibody mechanisms. IEEE T-SMC, 7(12).